Az eszköz hibája egy óra után mindössze 3 fok, mérete 50 x 65 x 24 mm, csak 50 gramm. A bemeneti feszültség 5 volt, fogyasztása 2 watt. Az egység -20 és +70 Celsius-fok között is működik. Az xOEMcore többféle módon konfigurálható, illetve szerezhető be:
- Az "xOEMcore" az alapegység, ami csak nyers IMU képességekkel bír.
- A "Navigation" fantázianevű extra inputok fogadását is lehetővé teszi.
- A "PP" lehetővé teszi a nyers fedélzeti adatgyűjtést, és ezzel segíti az utófeldolgozást.
- A "gx/ix" képes differenciális korrekció fogadására, míg
- A "gx/ix RTK" RTK-korrekciókkal dolgozik, és ezáltal a tehetetlenségi rendszer saját újra-inicializáló képességét javítja.

Mint fent írtuk, a rendszer képes fogadni RTK-korrekciót, ehhez RTCM v3, vagy RINEX DGPS inputot vár, és külső szenzorokkal is ki lehet egészíteni. Ezek utóbbiak lehetnek különféle GPS/GNSS eszközök, vagy (mobil térképészeti alkalmazásoknál) az odométer (kerékelfordulás jelző). Amennyiben egy UAV-ban, UAS-ben GPS/GNSS eszközzel kívánjuk kiegészíteni, akkor jelenleg három gyártó (u-blox, Topcon és Novatel) egy-egy típusa közül válogathatunk. Ezek integrációja és tesztelése megtörtént. Áruk eléggé eltérő (három külön kategóriáról beszélünk), de ennek oka van, - hisz az eltérő képességű eszközökkel az OXTS terméke más és más navigációs eredményre képes.
A u-blox LEA6 vevőjével az elérhető legjobb helymeghatározási pontosság 0,5 m (CEP), a sebesség mérési pontosság 0,02 m/sec (RMS), az iránymérés pontossága 0,06 fok (RMS), míg az orsózó és bólintó irányú pontosság 0,05 fok (RMS).
Amennyiben a felhasználó a másik két GNSS eszköz közül választ, a szögmérési pontosságok azonosak lesznek, viszont a sebességmérés pontossága elérheti a 0,015 m/sec-ot, míg a helymeghatározás pontossága 2 cm lehet a Topcon B110-es, illetve 1 cm lehet a Novatel OEM6 boardjaival.
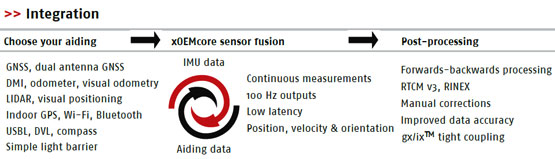
Cikkünk alábbi, - záró - ábrája a lehetséges szenzor-fúziók logikáját szemlélteti.